The Second Piece of the Puzzle
The next wearable that I came up with is to help with wrist mobility. This one though, is a challenging one. The wrist has multiple degrees of freedom, which means that the actuator that I have so far is wildly insufficient. Minimally, it has to be able to move in two directions i.e. in two degrees of freedom.
How I devised a solution to an actuator that can move in two directions
So I thought of the solution in this way.
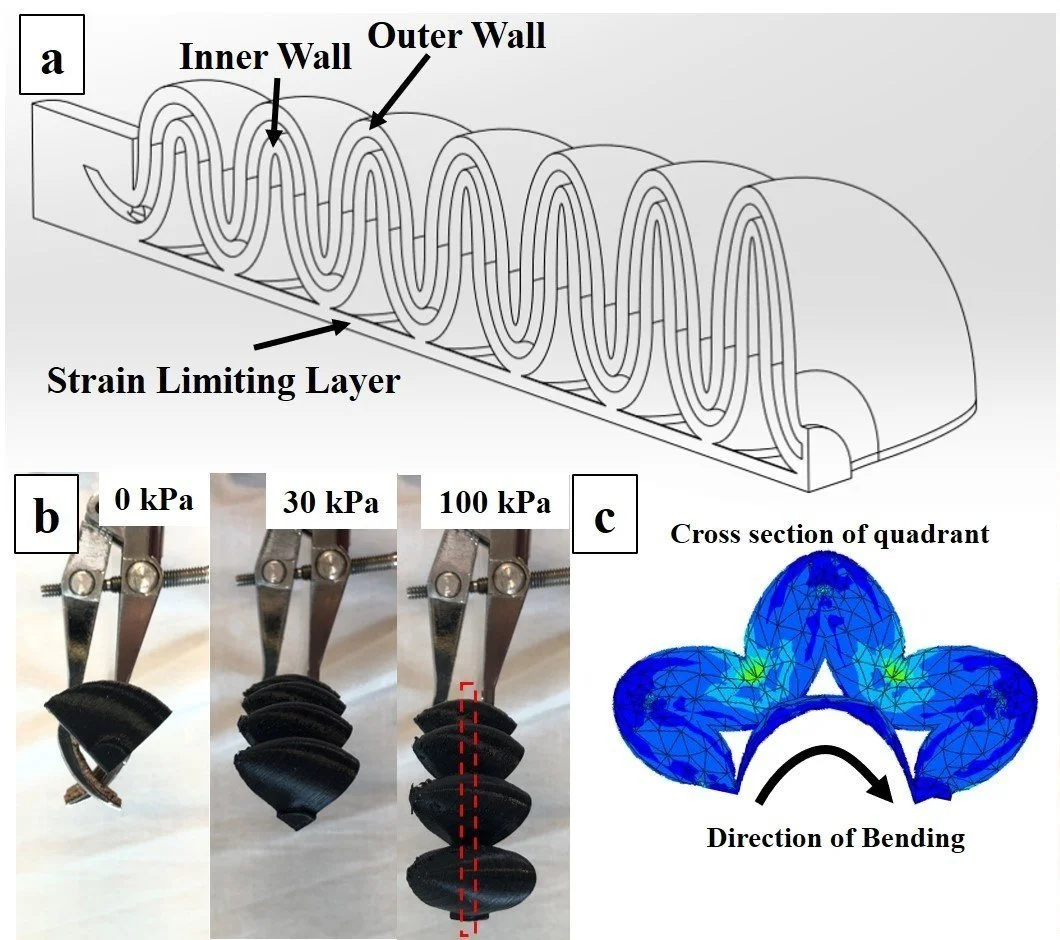
If a pure bending actuator has a force vector downwards and if another placed perpendicular to the first will have a perpendicular force vector, I could create a quadrant shaped actuator that has a direction of bending that is towards its central axis. And if I were to place 2 quadrant side by side and separate the 2 chambers, voila, I’d have an actuator that can bend in 2 diagonal directions!
Going a step further, if I were to make 2 of these, and pressurize any two adjacent actuators, I can create bending in 2 directions, perfect! Hint: think about how the force vectors will reinforce but also cancel each other out when 2 adjacent ones are pressurized.

By selectively pressurizing the quadrants, directional motion can be programmed.
I have to say though, coming up with this design is easy. It’s easy because it involves thinking, creativity and honestly, lots of daydreaming. #humblebrag
The hard part is to make the wearable itself because as a typical man, I am very bad at handicraft. Every part of my project so far was outsourced to a 3D printer. But I couldn’t run away from sewing these 2 actuators onto a fabric base in the end. I tried my best and came up with a really haphazard one with lots of frays coming out the side and the actuators were placed a little off.. yada yada.. gosh it was just horrendous to look at. Regardless, I did it (but I am definitely not putting sewing in my CV anywhere, no sir). This second piece was definitely a function over form kind of thing.
If you are interested in the full article, read it here.