The Cornerstone
My journey in academia begun with an accident.
Ten years ago, soft robotics was a novel field of study. Bellow-based soft actuators were the most common then, made popular by Prof. George Whitesides’s group. Likewise, what we were designing in our lab were also bellow-based in nature. Silicone was the default material of choice because of its hyperelastic properties.

PneuNet Soft Actuators
Then and now, this bellow design is the most common amongst soft robots.
Back then, my FYP topic was to create a soft robotic glove for rehabilitation while my fellow peer worked on a 3D printed bellow actuator for his. Using 3D printing to fabricate soft actuators had never been done before especially since flexible filaments were rare. Unlike now where a wide variety of flexible filaments are available ranging from 60A to 90A, only Ninjatek had them then - Ninjaflex. So print them in Ninjaflex he did.
After graduation, I stayed on to pursue a PhD and took some time to figure out my research goals and purposes. There were many prototypes lying around in our lab so I got my hands on a few, to experiment and gather some inspiration. Among them were a couple of failed, incomplete 3D printed actuators so I took and literally played with them, like a kid would. I bent them every way, I swung it around like a fidget toy, I stretched and pulled it… everything.
Until I had a Eureka moment.
When the actuator was pneumatically pressurized, I noticed that the palmar side or the strain limiting bottom, was ballooning out. The strain limiting layer must be unchanged else it defeats its purpose, hence the term “strain limiting”. And that was when I realized that a bellow is wildly inefficient. I had to redesign the whole thing. The top, wavy profile was absolutely needed to generate bending so instead, I thought of a continuous folding design.
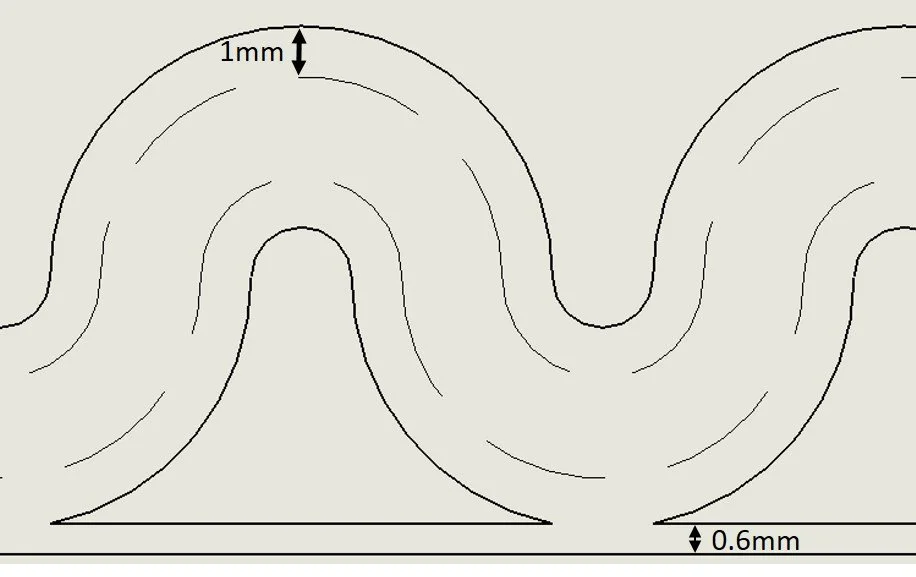
The fold-based design that I invented and eventually copatented.
To summarize my findings, this folding design was able to bend more and give more force under lower pneumatic pressures. Using 3D printing also meant that the design can be easily modified for multiple applications and uses. This work ultimately became the cornerstone of my PhD studies. More details of this design can be found in this research article here.
“Luck is what happens when preparation meets opportunity.”
People would say “Wow, a PhD, you must be smart!”. Except what I had wasn’t intellect nor luck. It was favor.